
日本発!! ブレイン・マシン・インターフェース新時代
寄稿 吉峰 俊樹,平田 雅之,牛場 潤一
2012.01.02 週刊医学界新聞(通常号):第2959号より
念じるだけでロボットを動かしたり,言葉を伝えることができる。それはもはや,空想世界だけの話ではない。
ブレイン・マシン・インターフェース(BMI)は,脳をダイレクトに機械につなぎ,これまでにない通信や生活のかたちを可能にし得る技術である。特に医療福祉領域では,失われた脳機能の代償や回復に役立つ技術として,寄せられる期待は大きい。世界中で熾烈な技術開発競争が行われるなか,わが国では多分野の協働により,独自性に富み,機能性に優れた医療BMIの研究開発が着実に進みつつある。来る実用化時代を見据え,人・社会と共生し,より多くの福音をもたらすBMIの在り方を,本特集にて展望してみたい。
さあ,BMI新時代へ。
吉峰 俊樹(大阪大学大学院 医学系研究科 脳神経外科学講座 教授)=監修
BMIの新技術で,難治性神経疾患・脳機能障害に光を
平田 雅之
大阪大学大学院 医学系研究科 脳神経外科学講座 特任准教授
牛場 潤一
慶應義塾大学理工学部 生命情報学科 専任講師
ブレイン・マシン・インターフェースとは何か
ブレイン・マシン・インターフェース(Brain Machine Interface; BMI)とは,脳と機械を直接つなぎ,脳機能を補填・増進させる技術の総称である。BMIは,脳に対する作用から「入力型」「中枢介入型」「出力型」に分類される(表)。
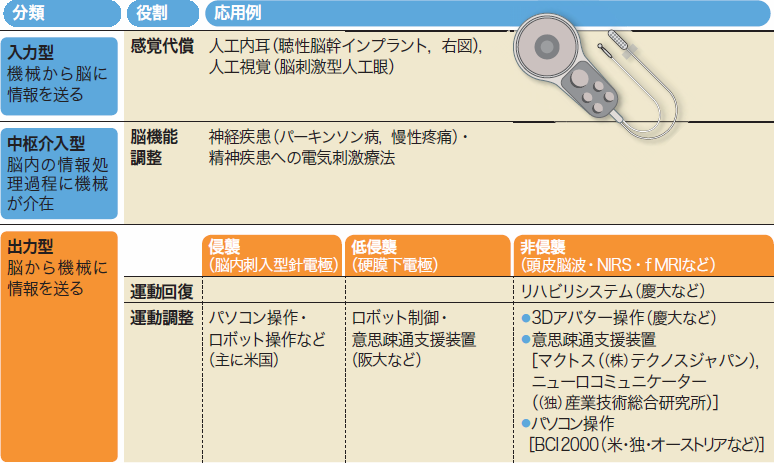
本稿で主に取り上げる出力型BMIは,脳信号を計測してコンピューターで解読(decoding)し,脳活動の内容を推定,外部機器を操作することで,失われた神経機能を代行,回復させる技術である。入力型,中枢介入型BMIと比較すると本格的な臨床応用には至っていないが,筋萎縮性側索硬化症(ALS)や脊髄損傷,脳卒中後の運動麻痺をはじめとする脳機能障害患者の機能補填や再建への活用が大いに期待され,研究が盛んに行われている。
出力型BMIは,手術により頭蓋内に電極を置く侵襲型と,手術をせず頭皮脳波や近赤外分光法(NIRS)などを用いる非侵襲型,大きく二つに分類することができ,目的・用途に応じて使い分けられている。
神経生理学分野における成果と課題
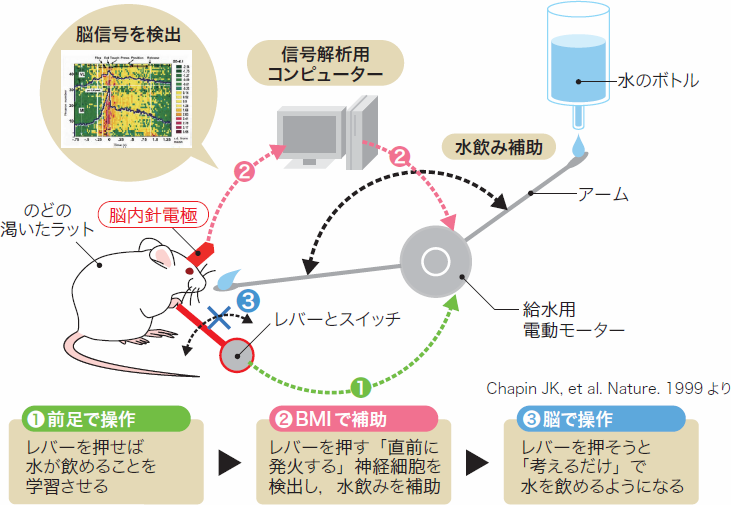
BMIによる機器操作を初めて実証した研究として有名なのが,Chapinらによるラットの実験である(Nature. 1999,図1)。彼らはまずレバーを押せば水がもらえる電動アームを用いて,ラットにレバー操作による水飲みを学習させた。次にレバー操作の直前に発火する神経細胞を脳内刺入型針電極から検出して,その神経細胞が発火すれば,水飲み操作を補助するよう電動アームの制御を変えた。しばらくするとラットはもはやレバーは操作しなくなり,頭でレバーを押すことを考えるだけで水飲みを操作するようになったという。
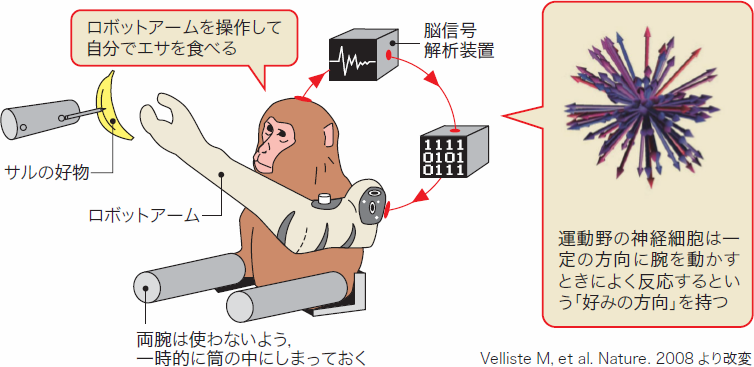
次いでDonoghueやSchwartzのグループがサルでコンピューターカーソルやロボットアームの制御に成功して注目された。Schwartzらは運動野の神経細胞に"preferred direction"と呼ばれる,一定の方向に腕が動いたときによく反応する特性があることを見いだしていた。その特性を制御に用いることにより,わずか100個程度の神経細胞の発火活動を計測するだけでロボットアームの3次元コントロールを可能にした(Nature. 2008,図2)。
これらの研究成果はいずれも基礎の神経生理学者が長年の研究により見いだしていた神経生理学的特徴をうまくBMIに応用したものと言える。しかし,微小な針電極を多数大脳皮質に刺入するため,脳自体に損傷を与えるだけでなく,神経活動計測という極めて繊細な環境を要し,慢性炎症反応による瘢痕組織が形成されることなどから,長期間にわたって安定した脳活動計測を行うことが困難であり,臨床応用には課題も残っている。
日本の医療用BMI研究最前線:低侵襲型BMI
米国の侵襲型BMIが主に微小針電極を用いているのに対して,わが国では阪大,ATR脳情報通信総合研究所,東大などを中心としたグループで,脳の表面に皿状電極をグリッド状に配置したシリコンシート電極(硬膜下電極)を用いた低侵襲型BMIが研究されている。
脳神経外科領域ではもともと,難治性てんかんの焦点源の同定や,難治性疼痛に対する大脳皮質電気刺激療法のために,硬膜下電極を2週間程度留置する方法がとられてきた。こうした診療背景のもと,倫理委員会の承認と患者さんの協力を得てBMIの臨床研究を進めてきた。
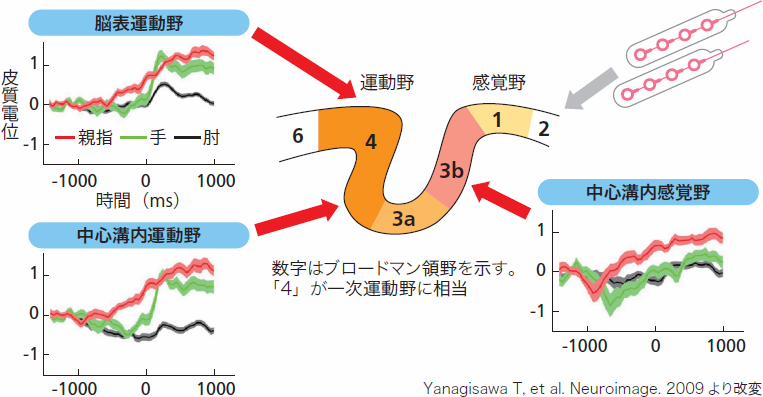
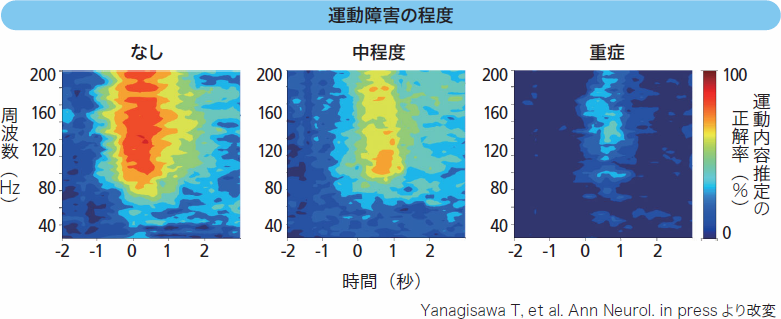
大脳における運動情報の最終出力は一次運動野であるが,ヒトでは中心溝と呼ばれる脳のしわのなかにその大部分がある。われわれは,中心溝内の一次運動野が運動内容の推定に有用であることを明らかにした(Neuroimage. 2009,図3)。次いで,運動時に生じるγ帯域(80-150Hz)の活動強度が運動内容の推定に有用であることから,これを用いたロボットアームのリアルタイム制御に成功した(J Neurosurg. 2011)。さらに運動障害を持つ患者でもγ帯域の活動は残っていることから,これを用いて運動内容の推定とロボット制御ができることを明らかにした(Ann Neurol. in press,図4,5)。意思疎通支援装置の開発にも取り組んでいる。

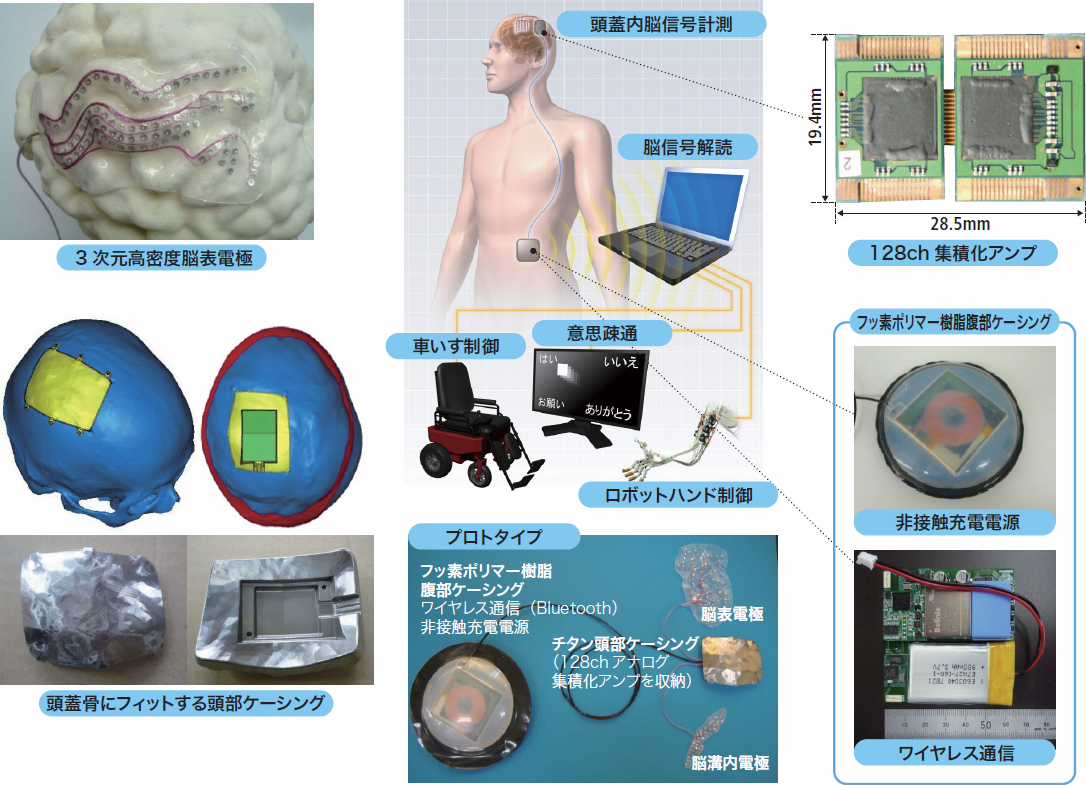
侵襲型BMIを臨床応用するには,感染のリスクを避けるため,最終的には装置をワイヤレス化し,体内埋込する必要がある。その開発には,図6のように個々人の脳表面にフィットする3次元高密度脳表電極,128ch集積化アンプ,Bluetoothワイヤレス通信回路,非接触充電電源,個々人の頭蓋骨にフィットする人工頭蓋骨兼用頭部ケーシング,フッ素ポリマー樹脂腹部ケーシングなど,これまでの埋込医療機器にはない斬新なアイデアを多数導入し,プロトタイプW-HERBS(the Wireless Human ECoG-based Real-time BMI System)を2011年3月に作製した(IEICE Trans Commun. 2011)。今後動物実験を経て,2014年をめどに臨床研究を行う計画である。
わが国の侵襲型BMIは,脳神経外科の診療の現場から始まり,実用化の面で世界最先端を行く研究になったといえる。
非侵襲型BMI
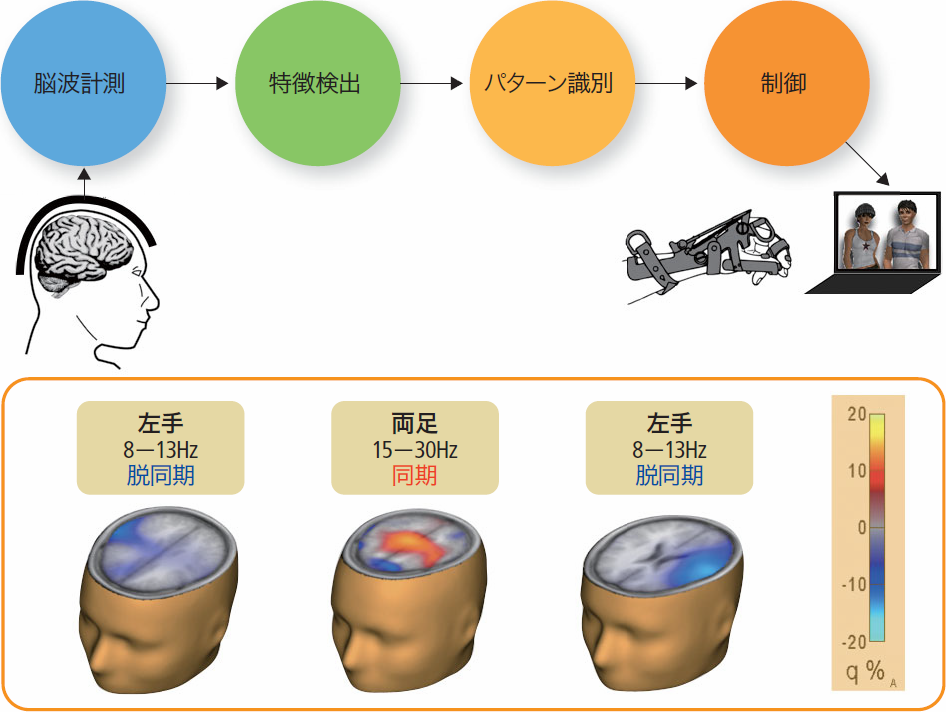
非侵襲型のBMIに取り組んでいるのは慶大のグループである。同大では,脳波を用いて運動想起時に生じるα-β帯域(8-30Hz)の信号強度の変化を計測し,BMIに用いており,筋ジストロフィー患者がインターネット上の3D仮想世界にいるキャラクターをBMIで操作することに成功している(図7)。
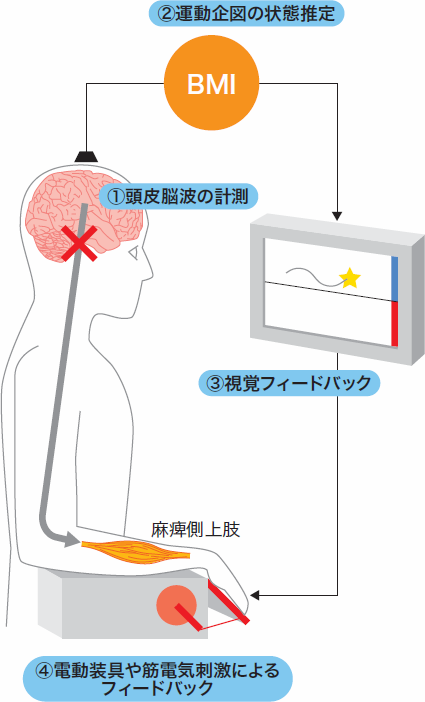
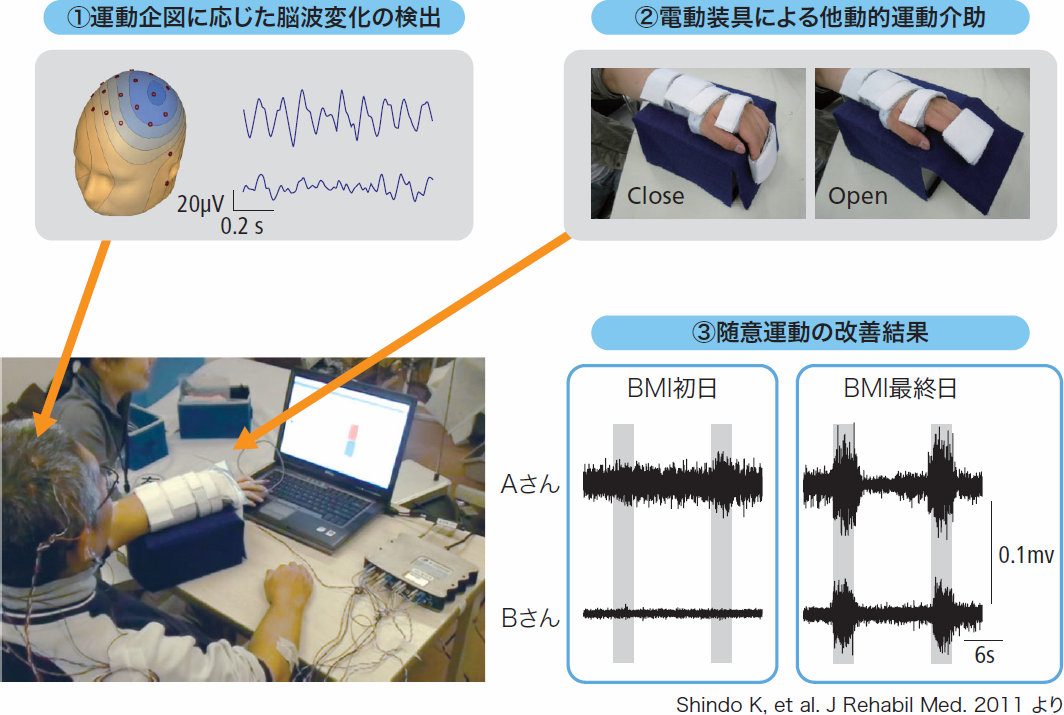
こうした機能代償型BMIに加え,同大では上記手法を用いて運動企図を推定し,麻痺肢を他動的に運動介助することでリハビリテーション効果を期待する機能回復型BMI(図8)にも力を入れている。脳卒中で麻痺のある患者を対象として,電動装具により麻痺側手指を動かすとともに,この変化を患者に見せる視覚フィードバックを4-7か月にわたって行ったところ,律動変化の大きさが有意に大きくなった。さらに重度の運動麻痺患者8例中4例で,随意的な筋電反応が生じるようになった(J Rehabil Med. 2011,図9)。これらはBMIをそのまま神経機能代償に用いるのではなく,患者の神経機能回復に応用するという独創的発想を実現した貴重な成果である。
医療用BMI研究の今後
非侵襲型BMIは,BMIを用いたリハビリテーションの臨床応用を図るとともに,脳波装置の多チャンネル化やNIRSとの併用による高性能化をめざす。
一方,侵襲型BMIに関しては,まずは有線での短期臨床研究を開始するとともに,ワイヤレス埋込装置の動物実験と実用化開発を進め,数年後をめどに臨床研究の開始をめざしている。ワイヤレス埋込技術は,非拘束長時間大量データ計測を可能にすることから,脳内情報処理研究に新しい研究パラダイムを創出する可能性もあり,脳科学や情報科学の研究に新展開をもたらすと期待される。
いま話題の記事
-
人工呼吸器の使いかた(2) 初期設定と人工呼吸器モード(大野博司)
連載 2010.11.08
-
事例で学ぶくすりの落とし穴
[第7回] 薬物血中濃度モニタリングのタイミング連載 2021.01.25
-
連載 2010.09.06
-
寄稿 2016.03.07
-
連載 2016.07.04
最新の記事
-
医学界新聞プラス
[第2回]食道胃接合部にみられる病変 (4)色調の変化があるもの
『内視鏡所見のよみ方と鑑別診断——上部消化管 第3版』より連載 2024.05.03
-
医学界新聞プラス
[第2回]心不全薬の使い方と使い分けをざっくり教えてください
『医学界新聞プラス 循環器病棟の業務が全然わからないので、うし先生に聞いてみた。』より連載 2024.05.03
-
医学界新聞プラス
[第2回]経皮的エタノール注入療法(PEIT):肝
『IVRマニュアル 第3版』より2024.05.03
-
医学界新聞プラス
[第1回]心エコーレポートの見方をざっくり教えてください
『循環器病棟の業務が全然わからないので、うし先生に聞いてみた。』より連載 2024.04.26
-
医学界新聞プラス
[第1回]バルーン閉塞下逆行性経静脈的塞栓術(BRTO)
『IVRマニュアル 第3版』より2024.04.26
開く
医学書院IDの登録設定により、
更新通知をメールで受け取れます。
医学界新聞公式SNS
シェアする



URLをコピーしました