
da Vinci手術の利点と課題(絹笠祐介)
寄稿
2018.05.21
【寄稿】
da Vinci手術の利点と課題
ロボット支援下手術を推進するには
絹笠 祐介(東京医科歯科大学大学院消化管外科学分野教授/同大医学部附属病院大腸・肛門外科診療科長)
手術支援ロボットは,内視鏡下手術の低侵襲性に加え,①高画質3次元画像による視認性,②直感的な操作,③繊細で複雑な鉗子操作が可能であるといった利点から,新たな手術アプローチとして期待される。ロボット支援手術は米国を中心に世界中で導入され,特に泌尿器科,婦人科を中心に急速に普及し,最近,欧米では一般・消化器外科領域での増加が著しい。現在,手術支援ロボットの主流であるda Vinci Surgical System(ダ・ヴィンチ手術システム,Intuitive Surgical社)は,米国で1999年に販売が開始され,2017年12月末までに世界で4400台以上が導入された。ダ・ヴィンチ手術システムを用いた手術は,この7年間で約2倍の増加を来し,17年度の総手術件数は80万件を超えている。
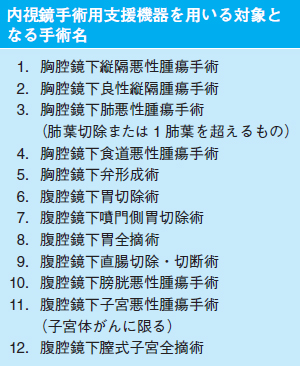
本邦では09年にダ・ヴィンチ手術システムが薬事承認され,大学病院を中心にロボットが導入された。12年4月より前立腺がんに対する全摘出手術が保険承認されたことにより国内においても急速に導入が進み,17年12月現在,約280台が稼働しており,5年前と比べると約5倍に増加している。18年4月からはこれまでの前立腺全摘,腎部分切除に加えて,新たに12術式(表)が保険適用となり,本邦でもますますの増加が期待される。
| 表 2018年度診療報酬改定にて保険収載されたロボット支援下内視鏡手術 |
 |
da Vinci手術の利点
利点❶人間の手首より広い可動域
従来の腹腔鏡下手術における課題の1つである鉗子の可動性に関しては,ダ・ヴィンチ手術システムでは先端が人間の手指や手首の動きを模倣する7自由度の可動範囲を持つEndo WristⓇにより制限が軽減される(図1)。このEndo WristⓇの可動域は540度と人間の手首の可動域より広い。特に,男性の前立腺背側から肛門管近傍の剥離に関してや側方郭清においては,その利点が重要となってくる。
 |
| 図1 人間の手首より広い540度の可動域を持つEndo WristⓇ(©Intuitive Surgical, Inc.) |
利点❷鮮明な画像情報による空間認識
3次元ハイビジョンカメラによる鮮明な画像情報が得られ,空間認識の点でも有利であり,腹腔鏡に不慣れな初心者においても,目的の位置に鉗子を容易に到達させることが可能となる。すなわち本システムは,開腹手術,腹腔鏡下手術双方の利点を取り入れた術式になり得ると期待できる。
利点❸縮尺機能と手振れ防止
実際の手の動きよりも最大5分の1まで縮小して動かすことができる縮尺機能が備わっている上に,手振れ防止機能も有しているので,高画質拡大視野と相まって,腹腔鏡では操作が困難な骨盤深部においても非常に精緻な手術を行うことができる(図2)。
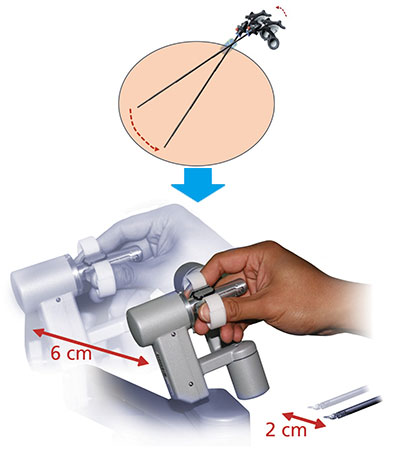 |
| 図2 最大5分の1まで手の動きを縮小できる縮尺機能(©Intuitive Surgical, Inc.) |
筆者の経験においても,男性の下部直腸癌や進行直腸癌など難度の高い手術においては,これまでの開腹手術や腹腔鏡下手術と比べて,より自分の思い描いた通りの剥離層を実現できると実感しており,前任地の静岡がんセンターでの手術成績でも,従来の腹腔鏡下手術や開腹手術と比べて,術後排尿障害の減少や術後局所再発率の低下が証明された。
利点❹二人羽織の手術指導を実現
また,容易な手術操作により,ラーニングカーブが従来型の腹腔鏡手術と比べて短く,初心者であっても比較的早期に安定した手術が可能になり,患者にとっても大きな利点となる。さらにデュアルコンソールを用いれば(図3),完全な二人羽織の手術指導が行え,手術を安全に指導でき,またその教育効果も非常に高い。
 |
| 図3 デュアルコンソールによる手術の様子 |
da Vinci手術の課題
課題❶触覚の欠如
ダ・ヴィンチ手術システムにはいくつかの課題がある。一つ目は触覚の欠如である。手術においてこの欠点は致命的とも言えるが,実際に手術をしてみると,鉗子の微細な動きや組織の変化,剥離層の広がり方として先端の触覚が視覚的に伝わってきて,筆者はそれほどの欠点とは感じていない。そればかりか,力のかけ方は腹腔鏡下手術以上に繊細に調整が可能である。現に当科での安全性試験においても,このことが起因となる合併症は認めなかった。しかし,手術において重要な,臓器・組織に対しての愛護的な操作には,ロボットの特性を十分に理解しておく必要があるし,これらを踏まえた手術が行えないと,かえって危険な手術手技となり得る。
課題❷アーム・鉗子同士の干渉
二つ目の課題は,ロボットの個々のアームが大きく太いため,体腔内・外でのアーム・鉗子同士の干渉が起こり得ることだ。第4世代のda Vinci Xi Surgical Systemでは,その干渉は大幅に解消されたものの,正しいセッティングが手術時間のみならず,手術全体の成否を決定する重要な因子である。このように,いくらラーニングカーブが短いといっても,ロボットには特有のコツとピットフォールがあり,導入当初は,難度の低い症例を選ぶような慎重な導入が必要と考える。
課題❸指導医,トレーニング施設不足
ロボット支援下手術を開始するに当たって,十分に経験を積んだ指導医が必要であることは言うまでもないが,国内において,十分に経験を積んだ医師は非常に少ないのが現状である。また,国内にはトレーニング施設も不足している。現存のトレーニング施設も既に予約でいっぱいの状況が続き,気軽にトレーニングできる環境ではない。海外ではご遺体を用いたcadaverトレーニングが主流となっているが,国内ではそのような施設は少なく,ロボットを使えるcadaverトレーニングセンターは,現時点では見当たらない。指導医やトレーニング環境の整備に比べて,国内で既に導入されているロボット数が多く,指導医の育成やトレーニング環境の整備が急務である。学会主導の下,まずは緩やかな普及に努めるのが肝要と思われる。
 きぬがさ・ゆうすけ氏
きぬがさ・ゆうすけ氏
1998年東医歯大卒,腫瘍外科学入局。2001年より国立がんセンター中央病院(当時)勤務。06年より静岡県立静岡がんセンター勤務,10年4月より同センター大腸外科部長。17年9月より現職。日本内視鏡外科学会技術認定医。日本ロボット外科学会理事。大腸癌治療ガイドライン作成委員会委員。専門は大腸がんの外科治療,腹腔鏡下手術,ロボット支援下手術。
いま話題の記事
-
忙しい研修医のためのAIツールを活用したタイパ・コスパ重視の文献検索・管理法
寄稿 2023.09.11
-
人工呼吸器の使いかた(2) 初期設定と人工呼吸器モード(大野博司)
連載 2010.11.08
-
連載 2010.09.06
-
事例で学ぶくすりの落とし穴
[第7回] 薬物血中濃度モニタリングのタイミング連載 2021.01.25
-
寄稿 2016.03.07
最新の記事
-
医学界新聞プラス
[第3回]人工骨頭術後ステム周囲骨折
『クリニカル・クエスチョンで考える外傷整形外科ケーススタディ』より連載 2024.04.19
-
医学界新聞プラス
[第2回]心理社会的プログラムを分類してみましょう
『心理社会的プログラムガイドブック』より連載 2024.04.19
-
医学界新聞プラス
[第1回]心理社会的プログラムと精神障害リハビリテーションはどこが違うのでしょうか
『心理社会的プログラムガイドブック』より連載 2024.04.12
-
医学界新聞プラス
[第2回]小児Monteggia骨折
『クリニカル・クエスチョンで考える外傷整形外科ケーススタディ』より連載 2024.04.12
-
医学界新聞プラス
[第5回]事例とエコー画像から病態を考えてみよう「腹部」
『フィジカルアセスメントに活かす 看護のためのはじめてのエコー』より連載 2024.04.12
開く
医学書院IDの登録設定により、
更新通知をメールで受け取れます。
医学界新聞公式SNS
シェアする



URLをコピーしました